Research Overview
Our lab works on developing theory and technologies for robot control. Our members acquire expertise in topics in control, robotics, dynamical systems, networks, and learning from data. We focus on the following two themes.
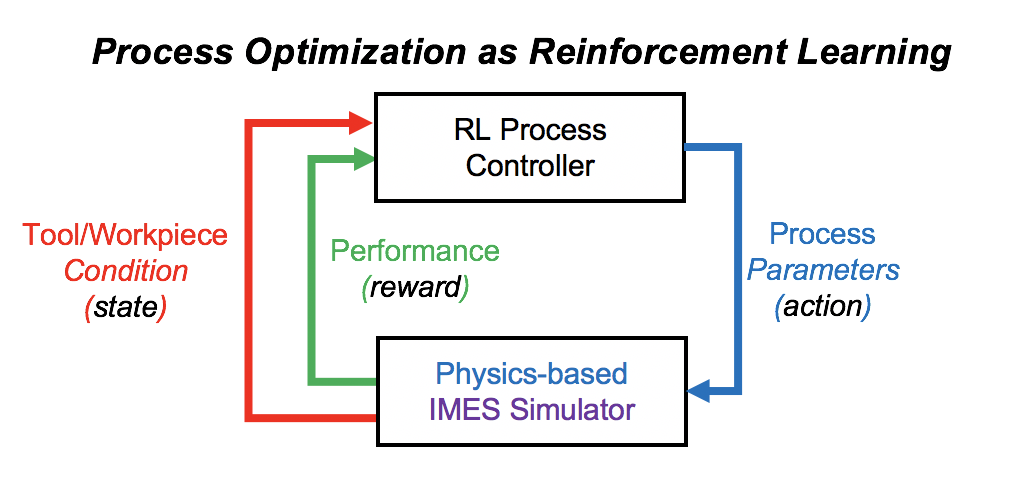
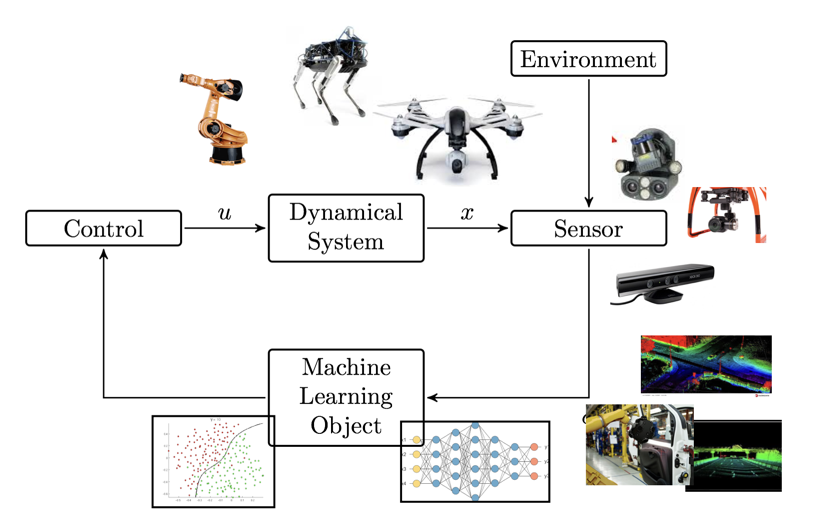
Learning For Control
Traditional methods for robot control rely on hard-coded abilities, so that their high performance is only achieved in controlled laboratory and factory settings. Our lab extends traditional robot control design methods by incorporating machine learning using systematic approaches. We rigorously and systematically account for uncertainties and limitations of machine learning techniques in the control design. This approach involves applying principles from control, dynamics, and learning from data to our problems.
Distributed Controllers
Our lab explores decentralized or distributed controller designs and implementations that enable robust motion control of robots. Controllers implemented on centralized computers with sequential program execution are not robust. Communicating control commands to actuators is also an issue for the latter. We apply principles from multi-agent control and networked control systems to design robust distributed control algorithms and architectures.